Robotvision mit der EyeVision Bildverarbeitungssoftware
Die Grundlage dafür ist die neue Erkennung basieren auf Deep Learning. Sobald die Objekte mittels Deep Learning erkannt wurden, werden die Greifpositionen und Winkel im 3D Bild bestimmt. Durch die Punktewolke wird dann ermittelt, welches der Objekte an oberster Stelle liegt und das Depalettieren beginnt. Die in der EyeVision vordefinierten neuronalen Netze erlauben dieses Vorgehe für eine Vielzahl an Objekten. Sollte ein Objekt noch nicht bekannt sein, kann es mit dem integrierten Lerntool schnell Zeit eingelernt werden, sodass auch diese Objekte sicher erkannt werden.
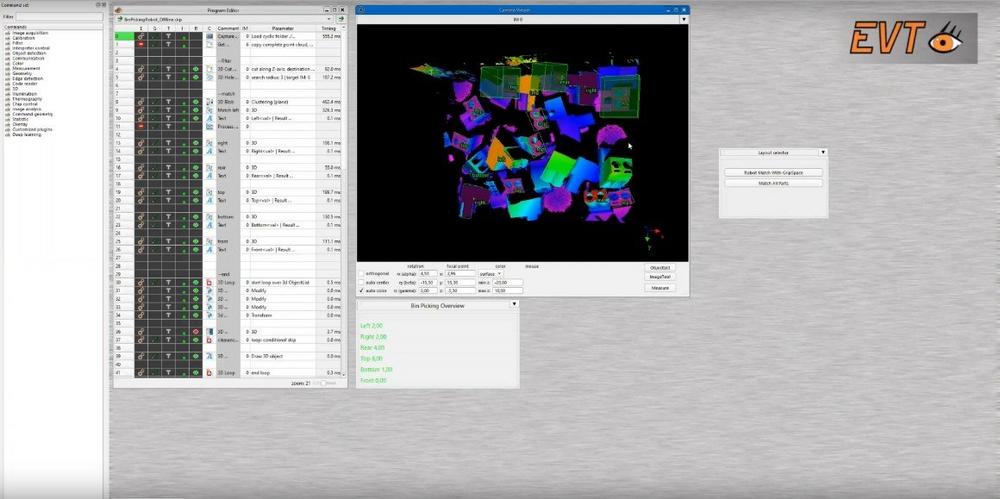
Bin Picking mit EyeVision
Bin Picking wird immer wichtiger. Dabei garantiert die EyeVision Software in Kombination mit einem Roboter, die Bauteile sicher aus dem Behältnis zu entnehmen. Dies erfolgt durch den leistungsfähigen Deep Learning Recognizer. Jener ermöglicht, in Verbindung mit einer 3D-Kamera, dass auch bei Schüttgütern die Bauteile sicher entnommen werden und beinhaltet zahlreiche schon vortrainierte Objekte.
Kompakte embedded Systeme mit bis zu 6 MIPI Kameras und 15 m Kabellänge können von der EyeVision Software angesteuert werden. Dabei erfolgt die Auswertung wie immer komplett ohne Programmierung nur durch grafische Konfiguration.
Durch den Deep Learning Recognizer, die Hand-Eye-Kalibrierung und der Korrektur der Absolutgenauigkeit durch die EyeVision Software können selbst kleinste Bauteile im gesamten Arbeitsbereich gegriffen werden. Das Ablegen der Objekte kann dann entweder blind an eine vorgegebene Stelle erfolgen oder aber ebenfalls über das Roboterauge, abhängig von der Anforderung, mit einem 2D oder 3D Sensor, kontrolliert werden.
Weitere Informationen zu Robotvision mit der EyeVision Bildverarbeitung erhalten Sie unter www.evt-web.com oder via Mail und per Telefon!
EVT Eye Vision Technology GmbH
Ettlinger Straße 59
76137 Karlsruhe
Telefon: +49 (721) 66800423-0
Telefax: +49 (721) 62690596
http://www.evt-web.com
Marketing und Vertrieb
Telefon: +49721668004230
E-Mail: elisa.deutsch@evt-web.com
![]()